

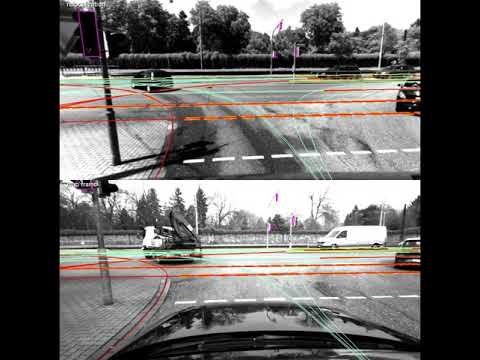
On the bottom, you see the original data sequence from the mapping run. On the top, you see a live run where re-localization is achieved by matching the live sequence to the map sequence. The annotated vector features have been generated only once, in the mapping sequence, but can be re-used during an online traversal. The features (like lane markings) are localized relative to the car at pixel precision.
For more information visit www.atlatec.de