

3D-DLAD-v4 Workshop
https://sites.google.com/view/3d-dlad-v4-iv2022/schedule
Speaker : Dr. Christos Sakaridis, Postdoctoral Researcher, Computer Vision Lab, ETH Zurich
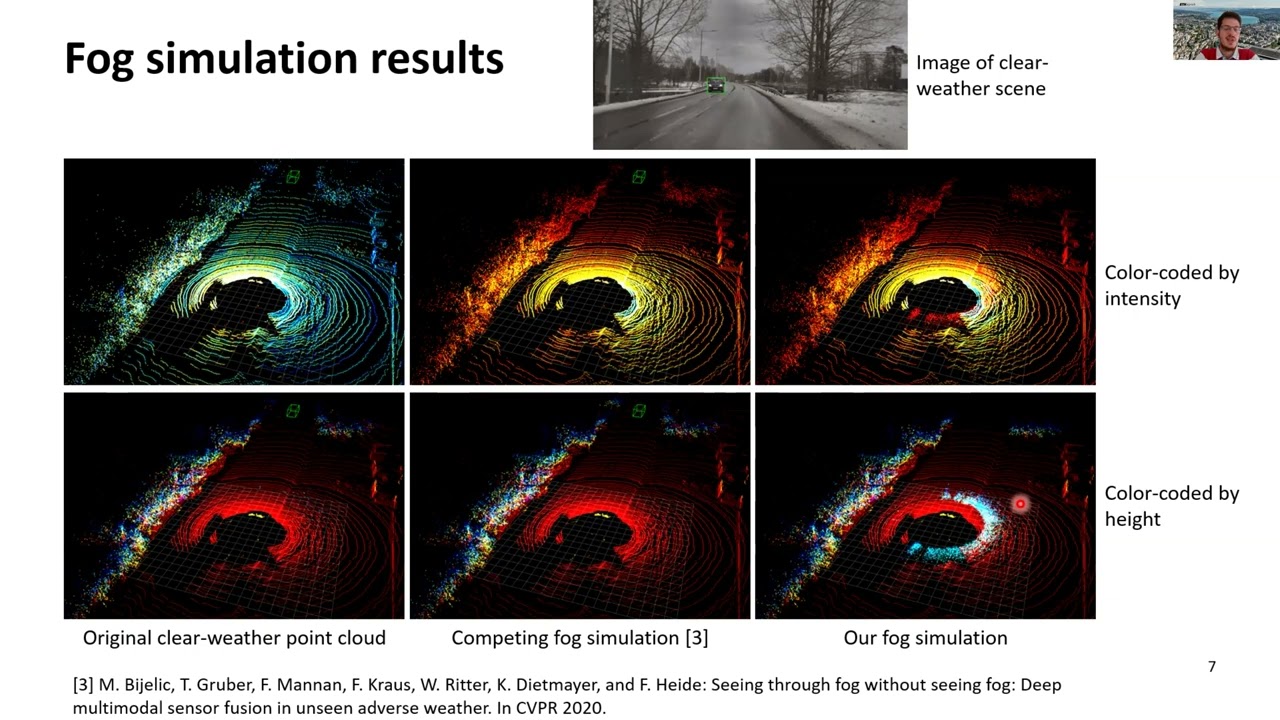
Abstract : 3D visual perception is a key enabler for automated driving, with exemplar tasks being 3D object detection and depth estimation, among others. In this talk, we will review how the prior knowledge we have about the physics of the acquisition of 3D sensor measurements as well as the geometric structure of the input scenes we observe can be leveraged to create representative training data and design well-tailored models which boost the performance of 3D perception. On the physics side, we will show how we have applied the linear system model for lidar optics to adverse weather conditions, namely fog and snow, to establish a physically-based non-learned transformation of clear-weather lidar point clouds to foggy and snowy counterparts. The resulting adverse weather simulation generates partially synthetic data which are shown to benefit several state-of-the-art methods for 3D object detection, without the need for access to real annotated adverse-weather data. On the geometry side, we will present P3Depth, a novel method for monocular depth estimation, which is based on a piecewise planarity prior, motivated by the high degree of regularity both in indoor and outdoor man-made scenes. The method uses this prior implicitly, by including an intermediate plane coefficient representation in the network, which is used to learn interactions between pixels in order to exploit potential co-planarities in predicting depth. P3Depth matches or even exceeds the state of the art in indoor benchmarks despite using a lighter network, and is competitive in outdoor benchmarks, ranking first in the closer depth range.