
As useful as GPS is, it’s not a system that we can rely on all the time. There are many situations in which GPS might not be available, such as when you’re inside a building, driving through a tunnel, on a battlefield, in a mine, underwater, or in space.
Systems that need to track location, like your cell phone, an autonomous car, or a submarine, often use what are called Inertial Measurement Units (a combination of accelerometers and gyroscopes) to estimate position through dead reckoning by tracking changes in acceleration and rotation. The accuracy of these location estimates depends on how accurate the sensors in those IMUs are. Unfortunately, gyroscopes that can do a good job of tracking rotation over long periods of time are too big and too expensive for most commercial or consumer-grade systems.
Researchers at the University of Michigan, led by Khalil Najafi and funded by DARPA, have presented a paper at the 7th IEEE International Symposium on Inertial Sensors & Systems on a new type of of gyroscope called a precision shell integrating (PSI) gyroscope, which the authors say is “10,000 times more accurate but only 10 times more expensive than gyroscopes used in your typical cell phone.” It offers the performance of much larger gyroscopes at one thousandth the cost, meaning that high-precision location awareness, indoor navigation, and long-term autonomy may soon be much more achievable for mobile devices and underground robots.
For some context on just how much better PSI gyro is, it’s important to understand the performance you get from the kind of gyroscopes that you almost certainly have in your cell phone.
Why gyros are important
Your phone has three gyroscopes plus three accelerometers that are combined into an inertial measurement unit (IMU) which can detect both acceleration and rotation in all three axes. This IMU probably costs a few dollars. The gyros in it have a sensitivity* that’s on the order of about 1,000 degrees per hour, meaning that if you spent an entire hour very slowly rotating your phone, the gyro would notice if there were three-ish or more rotations over that time, but if you rotated your phone a bit slower so that it rotated only twice over an hour, the rotation would be too slow for the gyro to detect. This is fine, because your phone only really cares about big, fast rotations (tens of degrees a second), like when you pick your phone up or flip it over.
Along with sensitivity, there’s also accuracy, or how close the rotation that a gyro measures is to the actual amount of rotation that it’s experiencing. Most sensors have some kind of accuracy offset, which is called bias—this is what the sensor sees when it should be seeing nothing, or in the case of a gyro, what it measures when it’s not moving at all. There’s nothing necessarily wrong with bias in a sensor as long as that bias is stable. If the bias is the same all the time, you can calibrate for it, and get accurate results. But if the bias is unstable, and changes unpredictably, that’s going to really mess with the accuracy of your sensor.
For a typical cell phone gyro, the bias instability is anywhere from hundreds to thousands of degrees per hour. Again, this is fine, because your phone is more concerned with measuring tens or hundreds of degrees of rotation on the second scale, which is all it needs for games or to stabilize the camera.
So why do we care about gyros with high sensitivity and stable bias at all? It may not be all that relevant for cell phones, but it’s exceptionally important for submarines, spacecraft, autonomous cars, indoor robots, and anything else where you need to keep track of where you are without relying on GPS. All of these systems use IMUs to track their relative position, taking their last known absolute position (from GPS or a pre-existing map or whatever) and then relying on the IMU to combine continuous measurements of acceleration and rotation to estimate motion relative to that point.
Essentially, it’s just a fancy method of dead reckoning, and like any other method of dead reckoning, small errors build up over time such that the longer you rely on it, the farther off course you’re likely to get. Submarines and spacecraft use fancy (and expensive) gyros full of lasers and stuff to minimize these errors and the resulting drift in positional accuracy, but for ground robots, drones, and (to a lesser extent) autonomous cars, size and mass and cost are significant factors. Whether it’s for a robot making a map in a mine, or an autonomous car driving through a tunnel, you want a gyro that’s sensitive, accurate, affordable, and small, all at the same time.

This is where the University of Michigan’s PSI gyro comes in, because it’s small, inexpensive, and thousands of times more accurate than a conventional cell phone gyro. The secret to this level of accuracy is the heart of the gyro— a resonating structure of ultra-pure metal-coated glass that looks almost exactly like a upside-down Bundt cake pan, or an upside-down bird bath.
To understand why the PSI gyro’s resonator is this shape, and how it works as well as it does, let’s first take a quick look at the kind of gyros that you have in your phone. They’re almost certainly mechanical vibratory gyroscopes, which are very small and easy to make with conventional semiconductor manufacturing techniques.
How gyros work
You can think of the core of these gyros (the mechanical resonator) as being kind of like a tuning fork—one of those metal things with a stem and two arms that vibrates (producing a tone) when you whack it against something. The specific kind of vibration that you get when you whack a tuning fork consists of the tips of the two arms (tines) oscillating in and out from each other (at 440 Hz for standard concert pitch)—that’s where the tone comes from.
Now, what happens if you give that tuning fork a twist, rotating it around its long axis? Inertia means that the tines want to keep vibrating in the same plane that they started vibrating in (the in and out vibration), but they can’t, since the base of the tuning fork is being rotated, and they’re attached to the base. Instead, the tines begin to vibrate in a second plane in addition to the first, due to the Coriolis effect—the same effect that you have to consider when measuring motion on Earth, because the Earth is rotating.
Anyway, for the rotating tuning fork, the Coriolis effect causes the tip of each tine to start oscillating back and forth (out of the plane of the tines). The more the tuning fork gets rotated, the more the in-and-out vibration gets converted into the back-and-forth vibration by the Coriolis effect, which means that measuring how much the tines of the tuning fork are vibrating back and forth can tell you how much rotation is happening at the base.
There are a bunch of different designs for these vibrating structure gyroscopes (sometimes called Coriolis vibratory gyroscopes), and only some of them have resonators that actually look like tuning forks, but they all work in pretty much the same way—whack a thing so that it vibrates, and then measure how much the in-and-out vibration gets converted into the back-and-forth vibration to calculate rotation.
Bird bath gyros
The PSI gyro looks nothing like a tuning fork—its resonator has that Bundt pan or bird bath shape, more generally referred to as a wine glass shape, which is helpful because (at least for me) it’s somewhat easier to imagine a vibrating wine glass. Just like the tuning fork, you can whack a wine glass and it’ll start vibrating. If you look at the wine glass from above, this vibration is the rim of the glass deforming slightly, going back and forth from a circle to ellipse. And also just like the tuning fork, if you rotate the wine glass, the Coriolis effect induces a second mode of vibration offset from the first that you can measure to figure out rotation.
A wine-glass-shaped resonator is much better at measuring rotation than a tuning-fork-shaped resonator for several reasons. First, the shape is axisymmetric, or symmetrical around a central axis. This symmetry means that the two modes of vibration happen at almost the exact same frequency, so when the Coriolis effect transfers energy from the first mode to the second, it’s very efficient, meaning that you get more vibration per amount of rotation, leading to a more sensitive gyro.
Wine-glass resonators also have a very high “Q factor,” which is a dimensionless measurement of the ratio between the amount of energy that’s stored in a resonator, and how much energy the resonator loses every time it oscillates. When you whack a wine glass, it vibrates, moving and making noise. If it kept doing this forever, it would have infinite Q, but of course it’s giving up energy in all sorts of different ways (acoustic, thermal, mechanical), so eventually it’s going to stop vibrating. A high quality wine glass might have a Q of several thousand. A typical cell phone gyro has a Q of a few hundred and vibrates for much less than a second. The resonator that makes up the core of the PSI gyro has a Q of 5.1 million (!), meaning that once it’s packaged up in a vacuum it’ll vibrate for 300 seconds after being whacked one single time.
The reason why high Q is important is because you want that primary vibration of your resonator to be as clean as possible, to more effectively transfer vibration from one mode to another. Other characteristics of the resonator that improve accuracy are relatively high mass and stiffness, both of which also make it less prone to noise.
Ten thousand times better
Put all of this together, and the bias instability (accuracy of motion detection) of the PSI gyro is an incredibly low 0.0014 degrees per hour, which is several tens of thousands times better than a typical cell phone gyro. This is easily sensitive enough to detect the motion of the Earth rotating under your feet.
But maybe you don’t need to measure the Earth’s rotation, so let’s take a look at how much of a difference this gyro might make for an autonomous car trying to accurately track itself without GPS.
We’ll assume that this car is using an IMU with flawless accelerometers, but the kind of gyros that you typically find in cars (a bit better than the one in your cell phone). We’ll also assume that the car is driving somewhere flat, meaning that we’re only concerned with the output of one single gyro (yaw).
After just one minute of driving at 5o km/h, the errors that accumulate from a standard automotive gyro will result in a positional error of seven meters. After five minutes, that positional error has increased to more than 850 meters. But for a car equipped with a PSI gyro, one minute’s worth of positional error is just two millimeters, and only 30 centimeters after five minutes, which (for an autonomous car) is potentially the difference between staying in the correct lane and ending up in the next town over. It’s huge.

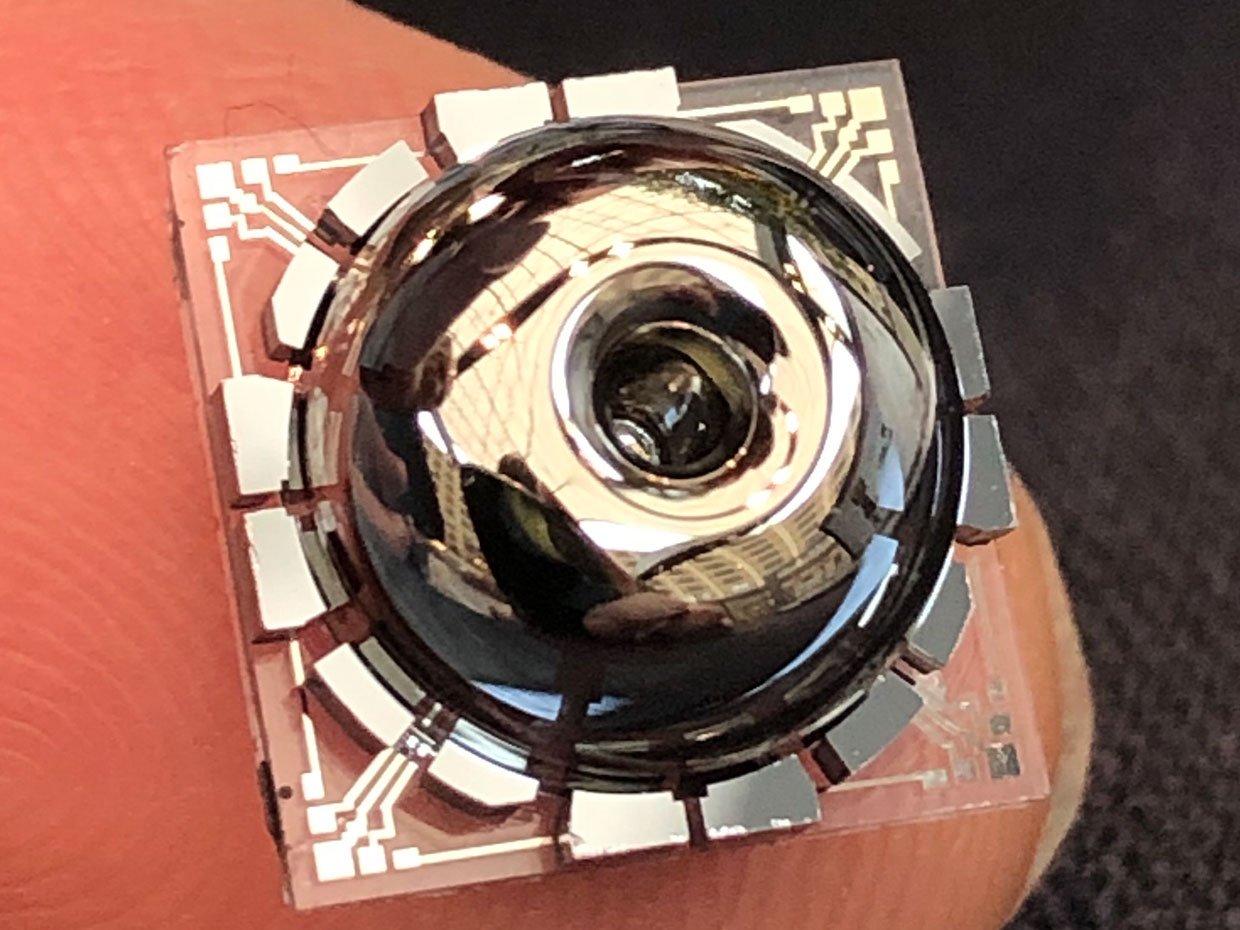
The PSI gyro’s resonator is manufactured from ultra pure fused-silica glass covered with an electrically conducting layer. The resonator is flipped upside-down, and then attached to a glass substrate by the center bit. The rim of the resonator isn’t attached to anything (so that it can resonate), but there are electrodes around the outside of the rim that drive the resonator (they do the whacking) as well as sense the vibration modes of the resonator to detect rotation.
The whole thing is packed up in a vacuum-sealed box, which is less than two centimeters in size. Getting a high Q factor, high mass, and high stiffness in a resonator gets much more difficult as you scale things down, which is what’s so unique about the PSI gyro—it’s not just the performance itself, but rather the combination of performance, size, and cost.
The researchers say that the performance of the PSI gyro is comparable to those super fancy gyros that the military uses on submarines, except that while those cost thousands or tens of thousands of dollars each, in production volume ( > 1 million units) the PSI gyros would cost as little as $50 each. It’s also at least 10 times smaller than those other high-performance gyros, which really makes you wonder why anyone would keep using them as soon as these things become commercially available.
Fortunately, commercial availability is part of the plan, we’re told—the folks behind the PSI gyro have formed a startup called Enertia Microsystems to commercialize both the PSI gyro and very similar design called the Birdbath Resonating Gyro (BRG), which is not quite as high performing as the PSI gyro, but is a bit smaller. They’re targeting autonomous vehicles, robotics, and some consumer applications, where there’s enormous potential for improvement through better, more affordable sensors.
*The technical definition of sensitivity is somewhat different than this in the context of gyroscopes, but the definition used here is a simpler way of communicating the same idea.
Source: spectrum.ieee.org


GIPHY App Key not set. Please check settings