
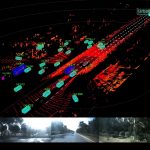
The video shows map of the environment being built ( and updated) using a 2D Laser Range Finder as the vehicle movies. Such a map is used to find distance, angle and relative velocity of obstacles around the vehicle / robot.
On the left is the simulation world, containing an autonomous car equipped with a 2D Lidar mounted in the front. The blue plane is the scanning plane of the laser sensor.
On the right is the visualizer, which is showing the environment map as the vehicle moves along. Yellow marked points are the points of intersection of laser beam and real objects, and hence, treated as boundaries of surrounding obstacles.

GIPHY App Key not set. Please check settings