
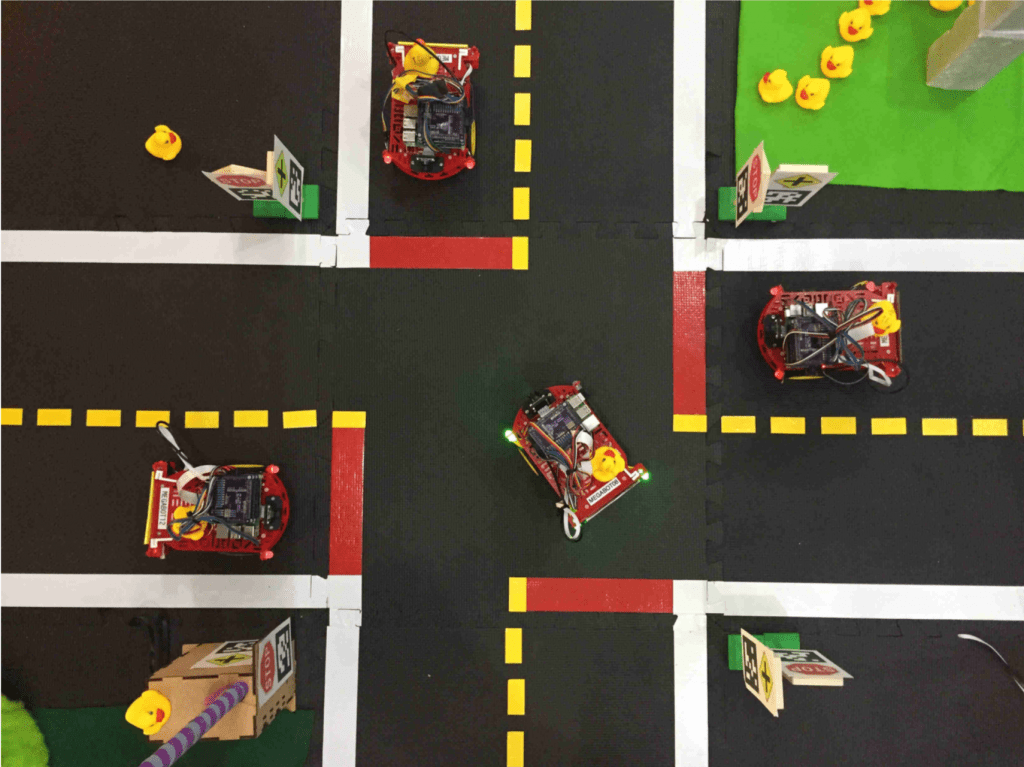
The latest buzz in automation research is for autonomous driving, but the vehicle’s field testing is still a challenge. To address a few of the hurdles, researchers at Mila in Montreal, ETH Zurich, NuTonomy, and the Toyota Technological Institute developed the Decentralized Urban Collaborative Benchmarking Network (DuckieNet). It is built using the Duckietown platform, which is an open-source platform. The attractive feature is it’s scalable, but construction is inexpensive.
The main component of the Duckietown project is a robot called Duckiebots. Duckiebot is made of an onboard sensor, Raspberry Pi, and DC motor powers the wheels.
DuckieNet expands on Duckietown by adding specific parts to the stage. A challenges server stores AI calculations, benchmarks, results, and figures leaderboards, and dispatching occupations to be executed to many assessment machines. The assessment machines, which can be local or cloud-based, run self-sufficient driving recreation.
The benchmarks can be defined by users in the Docker container, stored in the challenges server. Except for resetting and restarting the robot, the entire platform is autonomous.
Paper: https://arxiv.org/pdf/2009.04362.pdf
Github: https://github.com/duckietown
Source: www.marktechpost.com


GIPHY App Key not set. Please check settings